算法原理
速度的计算
 我们知道,要想计算速度,必须要有距离s和时间t.
我们知道,要想计算速度,必须要有距离s和时间t.
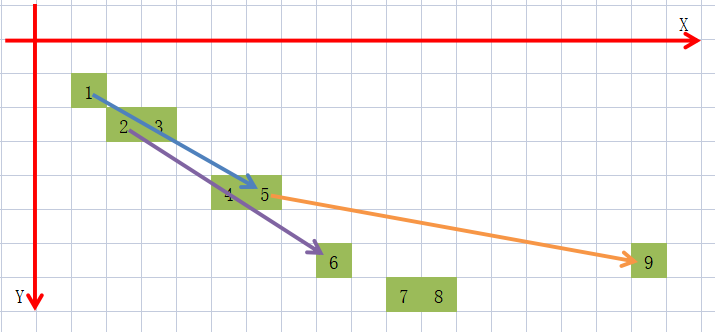
点1到点2之间的平均速度,既可以当做点1位置的瞬时速度,也可以当做点2位置的瞬时速度。
这里,不失一般性,我们把计算出来的值都归到起点位置,这样可以简化问题。
假设鼠标轨迹点有n个,那么速度序列就应该有n-1个,加速度序列就有n-2个,依次类推。
速度为0,可能仍在运动!
还是以上图为例,假设正在使用selenium的moveto操控浏览器。
先从点1跳到点2,然后原地sleep 12小时,再跳到点3,那么计算点2的速度就接近于0, 这就出现了漏检鼠标跳变的问题。
为了解决这个问题,我们对两点之间的时间差做了截断
self._arr_diff_time = np.clip(self._arr_diff_dis[:, -1:], 0, self.max_duration_silent)
这样,即使存在睡眠的情况,也会计算出一个高速的移动。
方向角的计算
 我们在计算方向角的时候,尽量避免使用连续的两个点,因为那样很容易出现大量45度,90度的现象,
不利于我们分析问题。
我们在计算方向角的时候,尽量避免使用连续的两个点,因为那样很容易出现大量45度,90度的现象,
不利于我们分析问题。
我们采用的方法为计算一定间隔的两点之间的角度,当作其起点位置的方向角,对应代码如下:
arr_diff_dis = self.arr_trace[self.max_doa_point:, :-1] - self.arr_trace[:-self.max_doa_point, :-1]
当方向角正切值等于无穷的时候,还需做截断:
np.clip(arr_diff_dis[:, 1] / arr_diff_dis[:, 0], -self.max_doa_tan, self.max_doa_tan)
轨迹向量化
轨迹向量化的目的是为了计算轨迹间的相似度。 这里我们需要考虑的问题包括:
具备一定容错性
存储开销不可过大
计算相似度的方法高效
具备一定可解释性
我们采用的是直方图的方法,采用分桶的机制进行像素级别的容错。 具体代码见 API
轨迹向量间的相似度计算
计算向量之间相似度的方法采用的是计算分布之间的绝对值距离, 该算法比起JS散度,计算更高效且可解释性强。 具体代码见 API